

(1)解説授業動画

- より簡単にRLC直列回路の式を導く方法(三角関数の合成を使って導く方法)はこちら→RLC直列回路の式を三角関数の合成を使って導く(インピーダンスや遅角についても解説しています)
☆YouTubeチャンネルの登録をよろしくお願いします→大学受験の王道チャンネル
(2)解説授業の原稿
RLC直列回路の電流と電圧
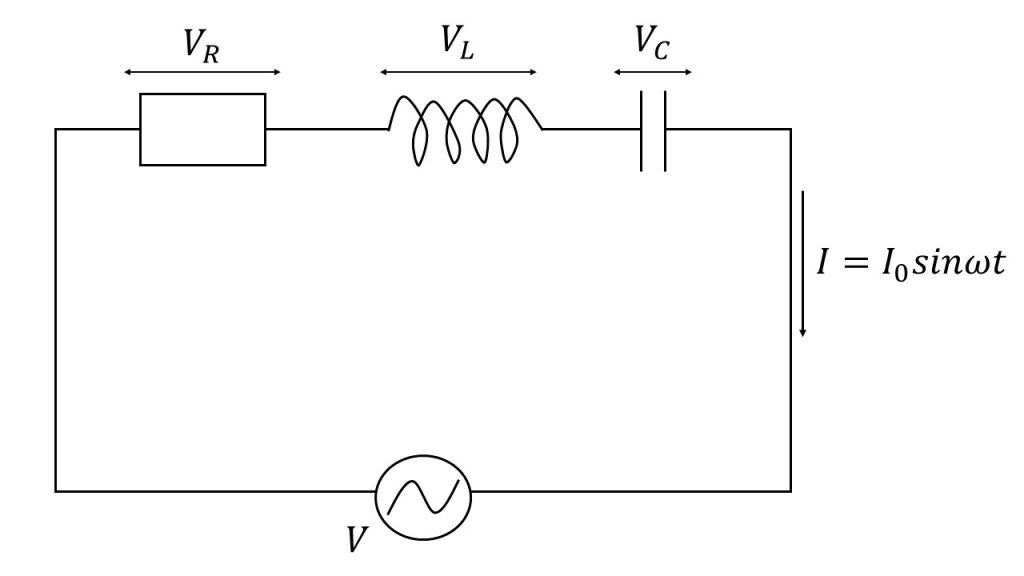
RLC直列回路とは、交流電源に抵抗とコイルとコンデンサーが直列で繋がれている回路のことをいいます。

RLC直列回路で、まず忘れてはいけない前提が1つあります。
それは、直列なので電流がどの場所でも同じであるということです。今回はその電流をI=I0sinωtとします。
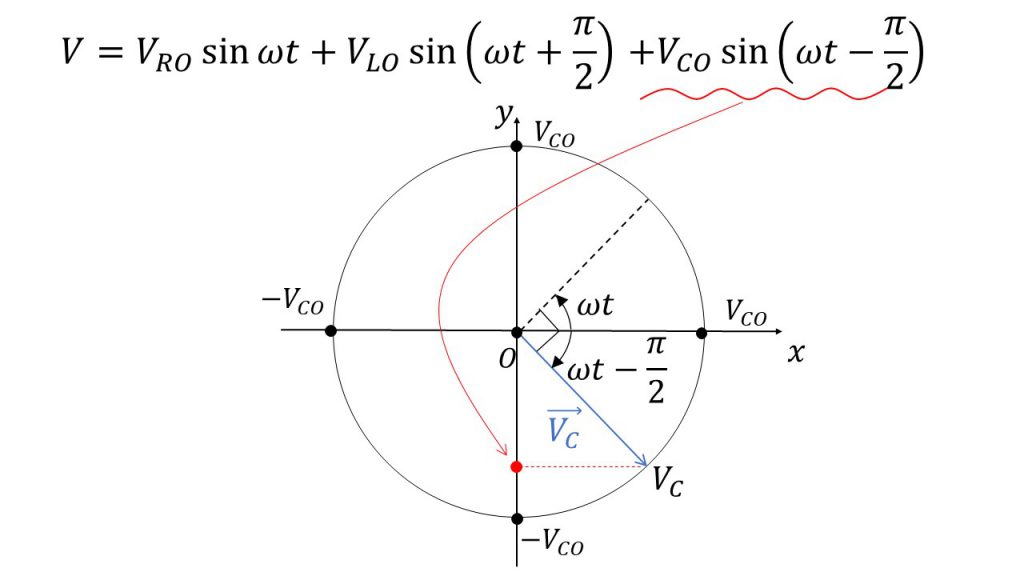
すると抵抗の電圧はVR0sinωtとなり、コイルの電圧はVL0sin(ωt+π/2)となり、コンデンサーの電圧はVC0sin(ωt−π/2)となります。
よって、直列回路なので電源の電圧は
V=VR0sinωt+VL0sin(ωt+π/2)+VC0sin(ωt−π/2)
このように全てを足したものになります。
電圧を合成するのに必要な2つの考え方
そして、この3つの電圧の足し算を
V=VR0sinωt+VL0sin(ωt+π/2)+VC0sin(ωt−π/2)=V0sin(ωt+α)
このように1つにまとめてみます。
この3つの三角関数の式を1つのsinの式に合成したわけですが、この式変形を理解するために必要な知識は2つあります。
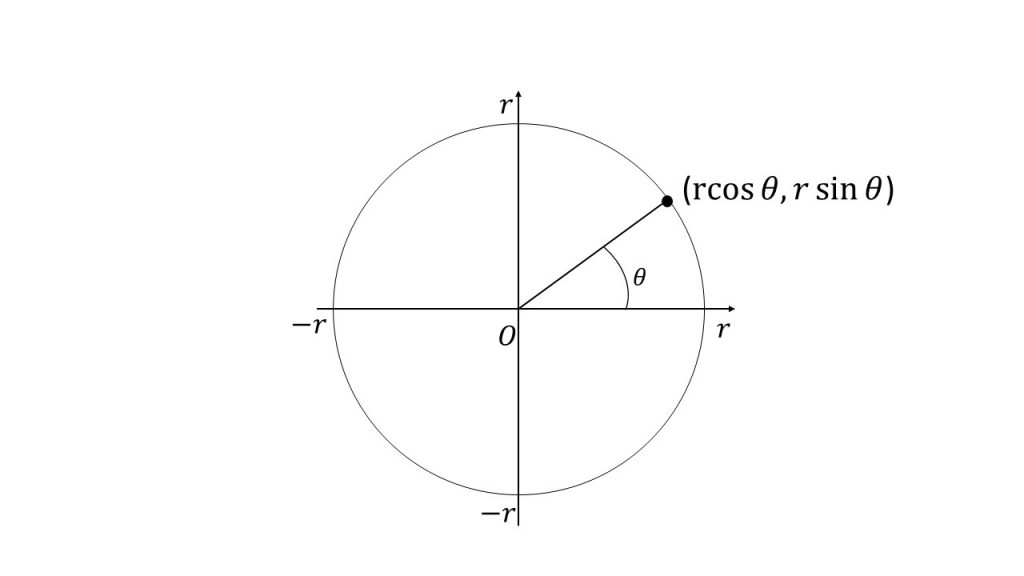
1つ目は、半径rの円の円周上の点の座標は(rcosθ, rsinθ)で表すことができるということです。
2つ目は、aベクトル=(x1, y1)、bベクトル=(x2, y2)のとき、aベクトル+bベクトル=(x1+x2, y1+y2)となることです。
円周上の点のy座標とみなす
まずは1つ目の考え方を使って
V=VR0sinωt+VL0sin(ωt+π/2)+VC0sin(ωt−π/2)
この式を見直してみます。
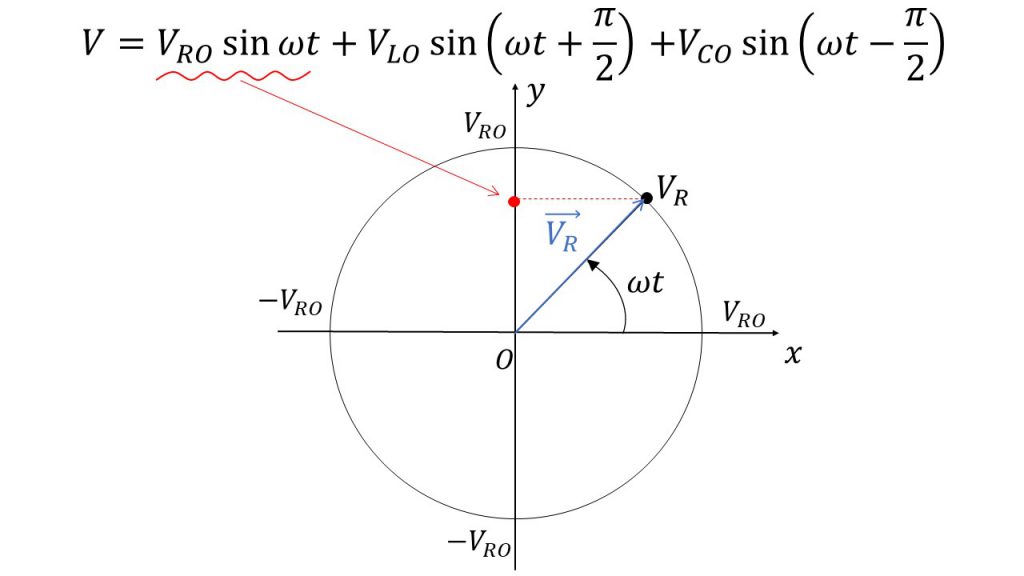
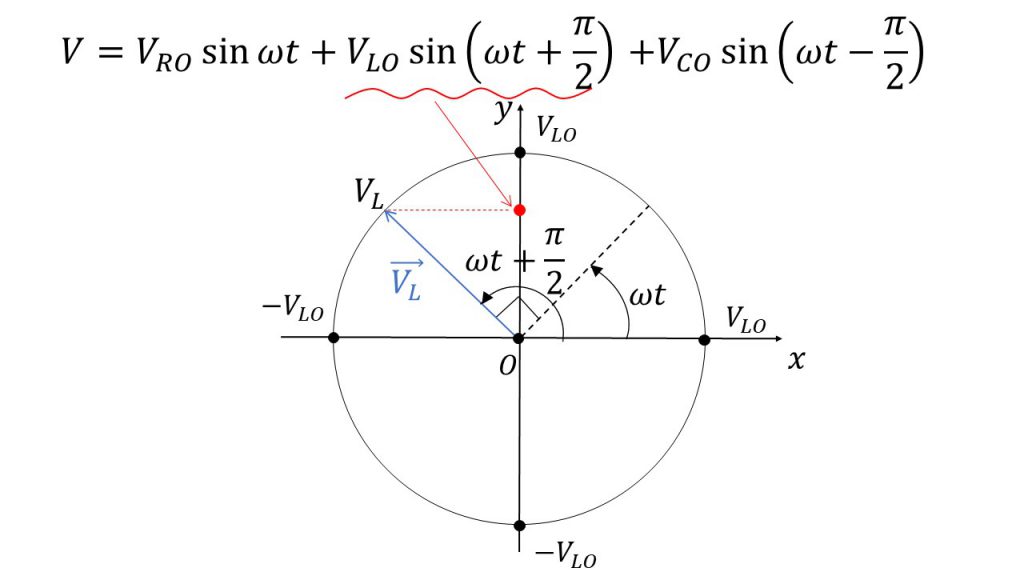
VR0sinωtというのは半径VR0の円の円周上の点のy座標と見ることができます。また、VL0sin(ωt+π/2)というのは半径VL0の円の円周上の点のy座標と見ることができます。そしてVC0sin(ωt−π/2)というのは半径VC0の円の円周上の点のy座標と見ることができます。
つまりVというのは円周上をそれぞれ動いている点のy座標を足したものであるということになります。
ベクトルを導入する
次に2つ目の考え方を使ってみます。
3つの円の円周上の点をそれぞれVR, VL, VCとします。
そして、OVRベクトルをVRベクトルとし、OVLベクトルVLベクトルとし、OVCベクトルVCベクトルとおき、Vベクトル=VRベクトル+VLベクトル+VCベクトルと定義すれば、Vベクトルのy成分はVRベクトルのy成分とVLベクトルのy成分とVCベクトルのy成分を足したもの、つまり
VR0sinωt+VL0sin(ωt+π/2)+VC0sin(ωt−π/2)
となります。すなわちこの式を考えるということは、Vベクトルのy成分を考えればよいということになります。
そしてVベクトルのy成分を考えるためには、このVベクトルの終点が半径いくつの円の円周上にあるか、そして角度がωtからどれぐらいずれているのかが分かればVベクトルの終点の座標がわかるようになり、Vベクトルのy成分もわかり、すなわちこの式がわかるようになるということになります。
Vベクトルの終点Vのy座標
それでは、Vベクトルの終点Vのy座標を考えてみます。
ポイントは、このVが存在する円の半径V₀がいくつかということと、そして、ωtからのずれαがいくつであるかということの2点です。
それを考えるために半径VR0の円、半径VC0の円、半径VL0の円をかいてみます。
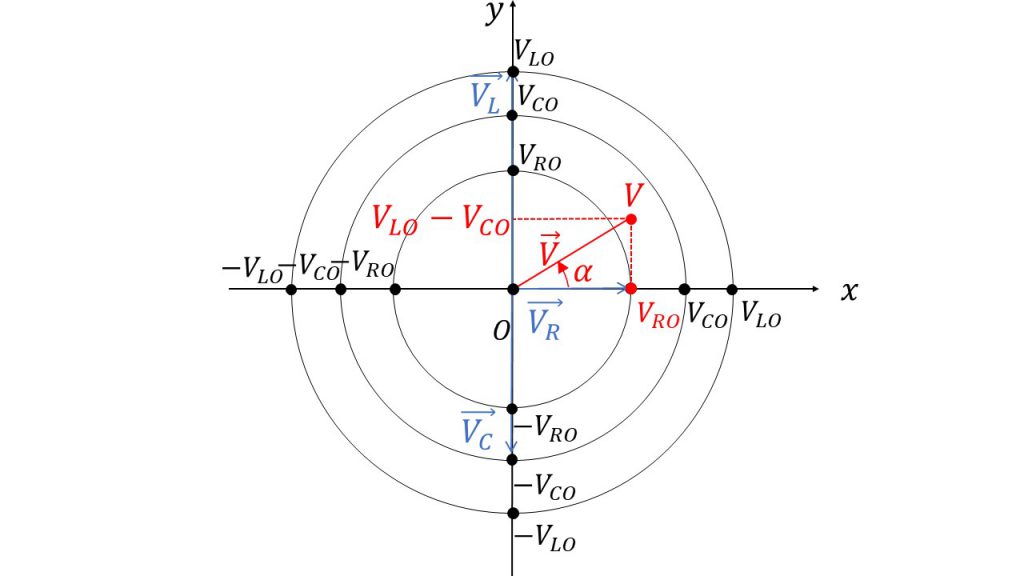
Vが存在する円の半径とωtからのズレはVRベクトルやVLベクトルやVCベクトルがどの位置にあっても変わることはないので、今回は考えやすくするためにωt=0のときを考えてみます。
すると VRベクトル=(VR0, 0)、VLベクトル=(0, VL0)、VCベクトル=(0, −VC0)となります。したがって
Vベクトル=VRベクトル+VLベクトル+VCベクトル=(VR0, VL0−VC0)
となります。よって半径V0はVベクトルの大きさと同じなので、三平方の定理を使って
V0=Vベクトルの大きさ=√VR02+(VL0−VC0)2
このように求めることができます。
次にωtからのずれαを考えてみます。Vベクトルの終点Vは、ωt=0のときはVベクトル=(VR0, VL0−VC0)なので、x座標がVR0、y座標がVL0−VC0となり、よってαは
tanα=(VL0−VC0)/VR0
をみたす角度ということになります。
ここまでの話をまとめると、Vは半径がV0=√VR02+(VL0−VC0)2となる円の上にあり、tanα=(VL0−VC0)/VR0を満たすαの分だけωtからずれた位置にある点ということになります。すなわち、半径と角度が分かったので、Vのy座標はV0sin(ωt+α)の形で表すことができるということになります。
インピーダンスと遅角を求める
もう一度RLC直列回路に戻ります。
この回路において抵抗、コイル、コンデンサーの電圧はそれぞれVR0sinωt、VL0sin(ωt+π/2)、VC0sin(ωt−π/2)となり、またVR0 、VL0、VC0は、
VR0=I0R、VL0=I0ωL、VC0=I0/ωL
となります。そして、電源の電圧はそれぞれの和となり、先ほど説明した通り
V=V0sin(ωt+α)
このように合成ができ、V0はV0=√VR02+(VL0−VC0)2この式を満たし、αはtanα=(VL0−VC0)/VR0を満たすのでした。ここで、
VR0=I0R、VL0=I0ωL、VC0=I0/ωL
この3つの式を
V0=√VR02+(VL0−VC0)2とtanα=(VL0−VC0)/VR0
に代入して式変形すると
V0=I0√R2+(ωL−1/ωC)2
tanα=(ωL−1/ωC)/R
このようになり、特に
Z=√R2+(ωL−1/ωC)2
をインピーダンス、
tanα=(ωL−1/ωC)/R
これを満たすαを遅角と呼びます。
インピーダンスを回路の抵抗とみなす
また2点ほど補足します。
まずはインピ―ダンスについてですが、インピーダンスをZとおき、
V=V0sin(ωt+α)、V0=I0√R2+(ωL−1/ωC)2
これらの式に代入すると、V=ZIの形になります。
このことが意味するのは、抵抗・コイル・コンデンサーをまとめて1つの抵抗Zとしてみることができるということです。
なぜ「遅角」と言うのか
次にαがなぜ遅角と呼ばれているかについて補足します。
今回、I=I0sinωtとして考えたのでVはV0sin(ωt+α)となり、電流に対して電圧がαだけ進んでいるという形になっていますが、電圧を基準として考え、V=V0sinωtとしたとき、IはI0sin(ωt−α)となるので、電流は電圧に対して遅れているということになります。
それゆえ「遅角」と呼ばれているのです。
RLC直列回路まとめ
結局のところ、RLC直列回路を見たときは、電流を基準に考えた場合(I=I0sinωt)、電圧は電流よりもα進み(V0sin(ωt+α))、電圧を基準にして考えたとき(V=V0sinωt)、電流は電圧に対してαだけ遅れます。(I0sin(ωt−α))
そしてαは
tanα=(ωL−1/ωC)/R
を満たし、抵抗・コイル・コンデンサーを1つの抵抗として見て、V0=ZI0として書くことができます。
そして回路全体の抵抗にあたるインピーダンスは
Z=√R2+(ωL−1/ωC)2
このように表される、といったことを使って問題に取り組めば、解くことができます。
しかし、よくわからないまま使うのではなく、なぜこうなるのかを知った上で使った方が、理解が深まりますし、応用させることもできます。
(3)解説授業の内容を復習しよう
問題作成中
(4)交流と電気振動(電磁気)の解説一覧
②交流回路における抵抗・コイル・コンデンサーの考え方(なぜコイルとコンデンサーで電流と電圧の位相がズレるのか)
④RLC直列回路の式を三角関数の合成を使って導く(インピーダンスや遅角についても解説しています)
(5)参考
☆物理の解説動画・授業動画一覧(力学・熱力学・波動・電磁気・原子)
☆物理に関する現象や技術(力学、熱力学、波動、電磁気、原子)